Pinzas Ópticas Holográficas Dinámicas
Cálculo y visualización en tiempo real de máscaras de fase holográficas para sistemas de pinzas ópticas. Implementa el algoritmo de Gerchberg-Saxton ponderado para conformar haces láser en múltiples trampas focalizadas para manipular partículas microscópicas.

Contexto de Negocio
Las pinzas ópticas usan haces láser enfocados para atrapar y manipular partículas microscópicas — células, esferas, moléculas. Un solo haz enfocado crea una trampa. Crear múltiples trampas posicionadas independientemente desde un solo láser requiere calcular máscaras de fase holográficas que dividen y redirigen el haz a través de un modulador espacial de luz. El desafío computacional: encontrar la distribución de fase óptima que produce fuerza de trampa uniforme en todas las posiciones deseadas.
Valor Estratégico
El algoritmo de Gerchberg-Saxton ponderado calcula máscaras de fase mediante ciclado iterativo de transformada de Fourier, con ponderación de intensidad asegurando fuerza de trampa uniforme. El cálculo en tiempo real permite posicionamiento interactivo de trampas vía comunicación WebSocket. La aplicación soporta 6 modos de aberración de Zernike para simular imperfecciones del sistema óptico. Originalmente desarrollado en CEFOP (Centro de Óptica y Fotónica), Universidad de Concepción. Modernizado como Python/FastAPI con visualización HTML5 Canvas.
El Desafío
Las pinzas ópticas requieren máscaras de fase precisas calculadas en tiempo real para crear múltiples trampas láser posicionadas independientemente. El algoritmo de Gerchberg-Saxton involucra transformadas de Fourier iterativas que deben converger rápidamente para manipulación interactiva de partículas microscópicas.
Nuestro Enfoque
Método de transformada de Fourier iterativa Gerchberg-Saxton ponderado para cálculo de máscaras de fase multi-trampa. Backend Python/FastAPI con visualización HTML5 Canvas, comunicación REST API + WebSocket para interacción en tiempo real. Desarrollado originalmente en CEFOP, Universidad de Concepción.
Indicadores Clave de Rendimiento
| KPI | Línea Base | Resultado | Impacto |
|---|---|---|---|
| Cálculo de Fase | Cálculo offline | Algoritmo GS iterativo en tiempo real | Posicionamiento interactivo de trampas |
| Configuración de Trampas | Trampa fija única | Múltiples trampas posicionadas independientemente | Manipulación flexible de partículas |
Arquitectura
cefop dinhot
Trapping Light
Optical tweezers use a tightly focused laser beam to trap microscopic particles — cells, beads, molecules. The radiation pressure gradient near the focus creates a stable 3D potential well that holds the particle in place. Moving the focus moves the trapped object. One beam, one trap.
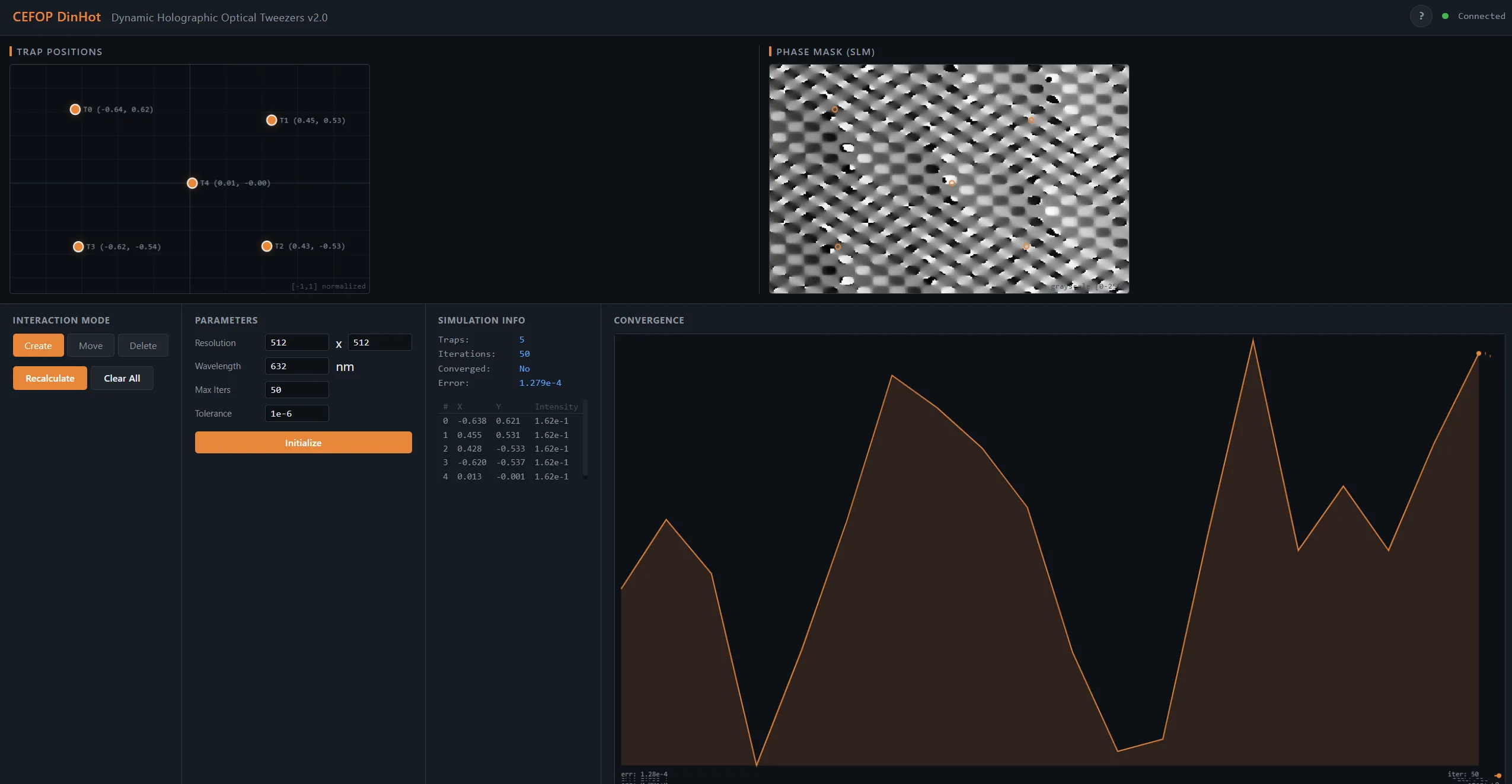
The challenge: creating multiple independently positioned traps from a single laser. The solution is a spatial light modulator (SLM) — a device that reshapes the wavefront without changing amplitude. The SLM displays a computed phase mask that splits the beam into multiple focal points, each capable of trapping a particle independently.
Computing the Phase Mask
The weighted Gerchberg-Saxton algorithm computes phase masks through iterative Fourier transform cycling: start with desired trap positions, inverse FFT to the SLM plane (extract phase, replace amplitude with uniform beam), forward FFT to focal plane (extract phase, replace amplitude with desired pattern), repeat. The weighting adjusts trap intensities at each iteration to ensure uniform trapping force — without it, outer traps tend to be weaker.
Convergence typically requires 10–50 iterations. The result: a phase pattern that, when displayed on the SLM, creates multiple laser foci at precisely specified positions in 3D space.
The application provides real-time phase mask computation with WebSocket communication for low-latency browser interaction, HTML5 Canvas visualization of phase patterns and simulated focal planes, and 6 Zernike aberration modes for simulating optical system imperfections. Originally developed at CEFOP (Center for Optics and Photonics), Universidad de Concepción.
Stack Tecnológico
Capturas de la Aplicación
Diagramas Técnicos

dinhot fourier optics

dinhot gs algorithm

dinhot trap types

gs phase overflow