Escritor Robótico — Simulación Scorbot III de 5 GDL
Entorno completo de simulación y control para un brazo robótico Scorbot III de 5 GDL que recoge bloques de letras y escribe palabras. Usa convención Denavit-Hartenberg con cinemática inversa analítica de forma cerrada para rendimiento en tiempo real.

Contexto de Negocio
La manipulación robótica requiere resolver cinemática directa e inversa en tiempo real. El problema inverso — encontrar ángulos articulares para una posición deseada del efector final — tiene múltiples soluciones y debe calcularse eficientemente para ejecución suave de trayectorias. Un manipulador serial de 5 GDL como el Scorbot III presenta una cadena cinemática tratable pero no trivial que sirve como excelente plataforma educativa y de investigación para explorar estos fundamentos.
Valor Estratégico
El sistema provee un entorno completo de simulación y control usando convención Denavit-Hartenberg con cinemática inversa analítica de forma cerrada — sin métodos numéricos iterativos, permitiendo ejecución suave de trayectorias en tiempo real. El robot recoge bloques de letras de un arco circular y escribe palabras, requiriendo planificación de trayectoria, interpolación multi-articular, coordinación de gripper, y conciencia del espacio de trabajo. Tres backends de hardware (Scorbot III serial, Arduino steppers, MATLAB Engine) soportan despliegue desde contextos educativos hasta investigación. Lo que comenzó como un ejercicio de laboratorio en 2004 evolucionó en una herramienta completa de exploración cinemática con visualización 3D interactiva.
El Desafío
Controlar un brazo robótico de 5 GDL requiere resolver cinemática directa e inversa en tiempo real. El problema inverso — encontrar ángulos articulares para una posición deseada del efector final — tiene múltiples soluciones y debe calcularse eficientemente para movimiento suave.
Nuestro Enfoque
Parametrización sistemática Denavit-Hartenberg para cadena cinemática de 5 articulaciones. Transformación homogénea T₀₅ = T₀₁·T₁₂·T₂₃·T₃₄·T₄₅ con cinemática inversa analítica de forma cerrada. Simulación 3D interactiva con Dash/Plotly, múltiples backends de hardware (Scorbot III serial, Arduino steppers, MATLAB Engine), API REST.
Indicadores Clave de Rendimiento
| KPI | Línea Base | Resultado | Impacto |
|---|---|---|---|
| Cinemática | Control articular por prueba y error | Cinemática inversa DH analítica | Control cartesiano en tiempo real |
| Soporte de Hardware | Interfaz de robot único | 3 backends (Scorbot, Arduino, MATLAB) | Despliegue flexible |
Arquitectura
robotic writer
The Task
A 5-DOF Scorbot III robotic arm picks letter blocks arranged on a circular arc and places them to spell words. What started as a 2004 lab exercise at Universidad de Concepción became a complete kinematics exploration environment — forward and inverse kinematics, trajectory planning, and multi-hardware control.
Denavit-Hartenberg Kinematics
The Scorbot III is modeled using the standard DH convention. The forward kinematics chain T₀₅ = T₀₁·T₁₂·T₂₃·T₃₄·T₄₅ computes end-effector pose from joint angles — five 4×4 homogeneous transformation matrices multiplied to give the complete gripper position and orientation.
The inverse problem — given a target (x, y, z, pitch, roll), find the joint angles — uses analytical closed-form solutions computed geometrically. No iterative numerical methods, no convergence issues, no local minima. This is critical for smooth real-time trajectory execution where the robot must move fluidly between pick and place positions.
| Joint | Type | θ | d | a | α |
|---|---|---|---|---|---|
| Base | Revolute | θ₁ | d₁ | 0 | -90° |
| Shoulder | Revolute | θ₂ | 0 | a₂ | 0° |
| Elbow | Revolute | θ₃ | 0 | a₃ | 0° |
| Pitch | Revolute | θ₄ | 0 | 0 | -90° |
| Roll | Revolute | θ₅ | d₅ | 0 | 0° |
The writing task requires trajectory planning between pick/place positions, coordinated multi-joint interpolation for natural motion, timed gripper open/close sequences, and workspace boundary awareness. Three hardware backends support different contexts: Scorbot III serial communication, Arduino stepper control, and MATLAB Engine integration.
Stack Tecnológico
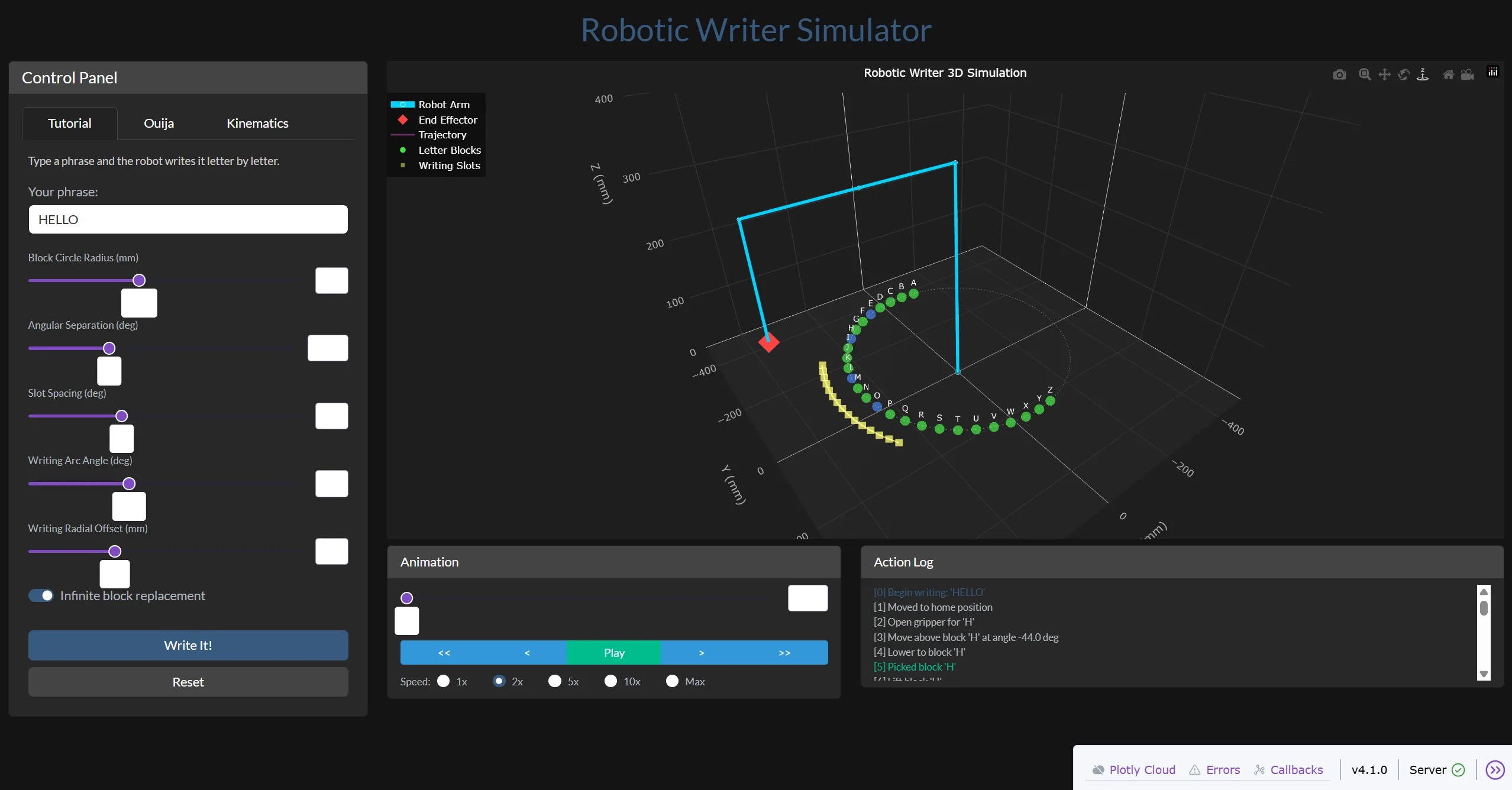
Capturas de la Aplicación
Diagramas Técnicos

robot dh frames

robot workspace